
Over the past months, an innovative research endeavour, funded by the NSERC, has been undertaken to explore the convergence of hardware and software in the realm of intelligent hexapod robotics.
Technical Achievements:
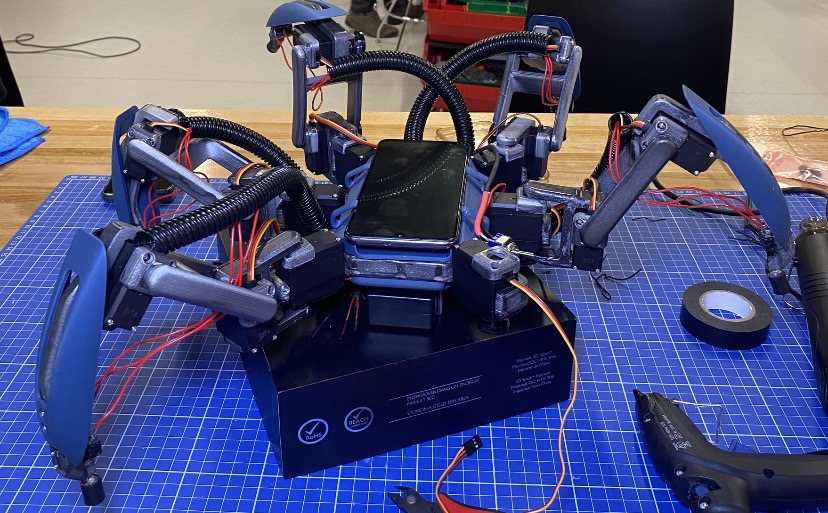
- 3D Printing and Physical Hardware: A significant technical milestone was achieved in the realm of 3D printing and physical hardware. The project successfully utilized layered 3D printing techniques to manufacture the intricate components of the hexapod robot. This accomplishment involved meticulous design, precision printing, and post-processing techniques to ensure the structural integrity and functionality of the robot’s physical components.
- Integration of ROS2: The project successfully integrated the Robot Operating System 2 (ROS2) framework, enabling seamless communication between various hardware components and software modules. This accomplishment streamlined data flow, allowing for efficient control and monitoring of the hexapod robot.
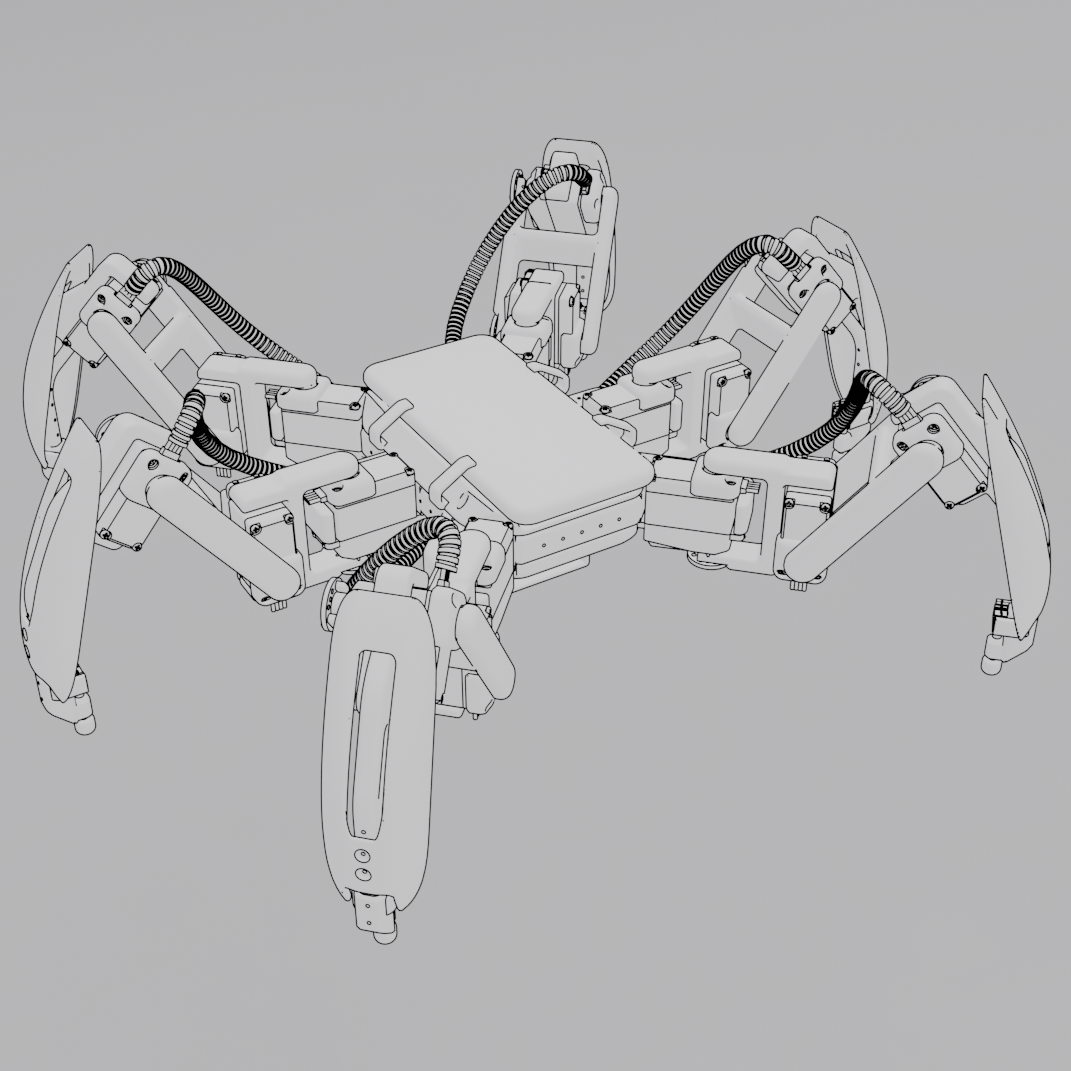
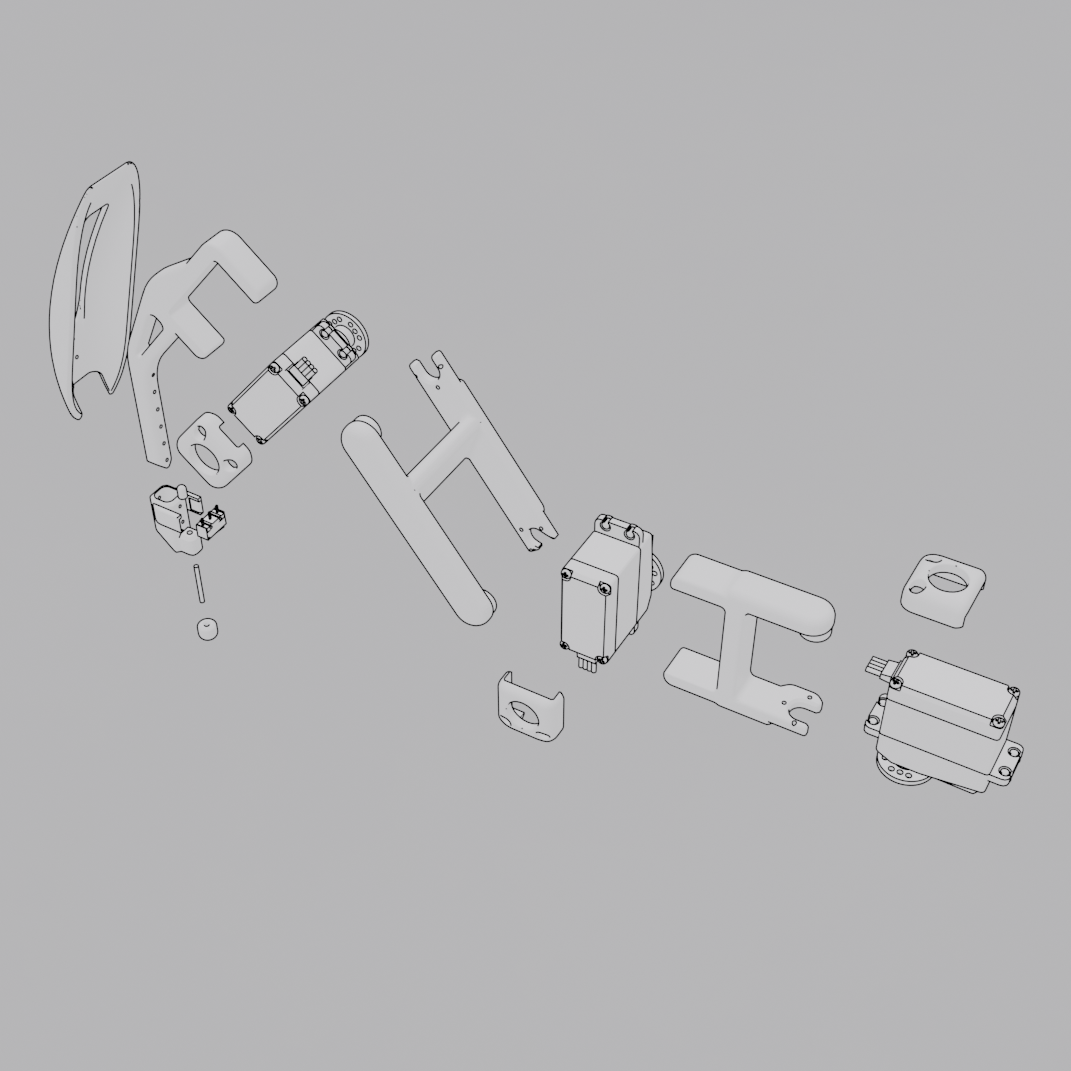
- URDF Modeling: A Unified Robot Description Format (URDF) model was meticulously created to represent the physical characteristics of the hexapod robot. This model serves as the foundation for simulation and provides a common reference for all software components.
- Simulation Environment: The project initiated the development of a sophisticated simulation environment, where the hexapod robot can be virtually replicated. The simulation environment aims to facilitate experimentation and training of the hexapod through reinforcement learning techniques.
Future Works:
While this phase of the project has concluded, there are exciting future prospects:
- Simulated Gait Reinforcement Learning: The URDF model, available on the project’s GitHub repository, will be employed to simulate and experiment with various gait patterns for the hexapod robot. Reinforcement learning algorithms will be applied in digital environments such as Nvidia Isaac Sim, Unity ML Agents, or similar platforms to enhance the robot’s locomotion and adaptive capabilities.
- Contributions Welcome: I invite researchers, engineers, and enthusiasts to explore the project’s GitHub repository and contribute to its growth. Collaborative efforts will be invaluable in advancing the field of intelligent hexapod robotics.
Temporary Conclusion:
As of now, my direct involvement in this project will temporarily cease. However, the journey continues as we enter a phase of collaborative exploration and development. Together, we can push the boundaries of what intelligent robotics can achieve.
GitHub Repository: https://github.com/gdgiangi/hexapod
Articles: Part 1, Part 2, Part 3
Code
Available
Release Date
October 2023
License
Open Source



Leave a comment